definitional · Article
ATP, ATO, ATS: The Three-Layer Triad of Modern Train Control
In 1981, the Bay Area Rapid Transit District ran one of the most consequential signaling tests in US transit history. BART operators were instructed to attempt to override the system’s automatic speed enforcement by holding the throttle open through a cab-signaled speed restriction. The test was watched closely; cab signaling on this scale was new in North America. The system did exactly what it was designed to do: it ignored the operator’s input and applied the brake. That moment crystallized a principle that would govern every subsequent generation of train control, including modern CBTC: safety enforcement is not advisory. The triad of Automatic Train Protection, Automatic Train Operation, and Automatic Train Supervision encodes that principle into a strict three-layer architecture in which one layer has final authority and the other two operate inside it. This post explains what each does, where the boundaries are, and why agencies that confuse them get into procurement trouble.
Why this matters for procurement
The ATP/ATO/ATS distinction sounds like an academic taxonomy. It is not. It is the operational and safety boundary that determines who is liable in an incident, what the safety case must prove, what the Federal Transit Administration and state safety oversight reviewers will scrutinize, what is SIL 4 versus SIL 0, and which functions can be modified through software updates without re-certification. An RFP that specifies “CBTC with full automation” without naming the GoA level or the responsibility allocation across ATP, ATO, and ATS is an RFP that has not made the decisions that matter. This post is for the program manager, the systems integrator, and the consultant who needs to read those RFPs with their eyes open.
ATP: the safety floor
Automatic Train Protection is the layer that cannot be overridden, cannot be turned off, and must operate every cycle whether or not anyone is driving. Its sole job is to ensure that the train cannot exceed its Movement Authority and cannot reach unsafe speed for current track conditions.
ATP runs on the onboard Vehicle On-Board Controller (VOBC) and on the wayside Zone Controller (ZC), both of which must be certified to Safety Integrity Level 4 under IEC 61508 and IEC 62279. The wayside ATP, embodied in the Zone Controller, generates the Movement Authority — a signed promise that says “you may proceed up to point X at no faster than speed Y” — and updates it every one to three seconds. The onboard ATP, embodied in the VOBC, validates the Movement Authority on receipt, computes a continuous speed envelope between the train’s current position and the end-of-authority point, and supervises the train against that envelope every 50 to 100 milliseconds.
If the train exceeds the envelope, ATP commands the brake. There is no consultation with the operator, with ATO, or with the dispatcher. The brake applies. The system logs the event. Service resumes only when the train has been brought to a controlled stop and the operator has acknowledged the intervention.
ATP achieves SIL 4 through redundant hardware (typically 2-out-of-2 or 2-out-of-3 voting), diverse software implementations (two independent code bases derived from the same specification, often in different languages), formal verification of the safety logic, and continuous self-test of every input and output. The development lifecycle is governed by the V-model laid out in EN 50126, EN 50128, and EN 50129. The cost of this rigor is substantial: ATP development consumes roughly 60 to 70 percent of nonrecurring CBTC engineering effort. The benefit is the ability to retire a century of operator-mediated SPAD risk. (For a closer look at the onboard side, see The Onboard Side of CBTC: Inside the VOBC.)
ATO: the performance optimizer
Automatic Train Operation is the layer that drives. It commands traction and braking to follow a target speed profile, stops the train within roughly 30 centimeters of the platform marker, and selects coast points that maximize regenerative braking and energy efficiency.
ATO operates strictly inside the envelope ATP has drawn. If ATP says “you cannot exceed 60 km/h between here and the next station,” ATO might choose to run at 50 km/h to balance schedule adherence against energy consumption. If ATP says “brake,” ATO commands brake; ATO has no authority to override. ATO is the difference between a CBTC system that just enforces safety and one that delivers the operational benefits — precision station stops, smooth acceleration, energy savings of 8 to 12 percent on lines with regenerative braking — that justify the capital investment.
ATO is typically certified to SIL 0, 1, or 2 depending on the deployment. The reasoning is structural: ATO failure cannot cause a safety event because ATP catches every safety violation. ATO failure causes a service event — the train operates manually, or stops and waits, or fails over to a backup ATO module — but never an unsafe one. This separation is what allows ATO algorithms to be modified through software updates with relatively lighter re-certification burden. Modern ATO uses model-predictive control or fuzzy logic to optimize for energy and dwell time; on Washington Metro’s Red Line CBTC modernization, energy consumption decreased by approximately 12 percent after ATO commissioning.
ATO is mandatory at GoA 3 and GoA 4 (driverless and unattended) and optional at lower Grades of Automation. The vast majority of deployed CBTC lines globally operate at GoA 2 with ATO active and a human operator monitoring; the operator approves departure and handles exceptions, while ATO drives. (For the GoA framework, see What Is a Zone Controller? CBTC’s Wayside Brain Explained.)
ATS: the dispatcher’s brain
Automatic Train Supervision is the layer that lives in the operations control center. It schedules trains, sets routes through interlockings, regulates the timetable in response to disruption, monitors fleet health, and presents the human operator with a line-wide picture. ATS is the system the dispatcher actually interacts with; ATP and ATO operate behind the scenes.
ATS sits above both ATP and ATO in the operational hierarchy but below them in the safety hierarchy. It tells trains where to go, but it does not tell them how to drive safely. If ATS commands a route that ATP cannot support — for example, into a section where another train’s Movement Authority extends — the wayside denies the route, ATS receives the rejection, and the dispatcher sees an exception. ATS cannot force ATP to grant unsafe authority.
ATS is typically certified to SIL 0. Like ATO, the reasoning is structural: ATS failure cannot cause a safety event because ATP enforces safety regardless of what ATS commands. ATS failure causes a scheduling event — trains keep moving safely under their existing Movement Authorities, but new authorities may not be granted optimally and the line may experience bunching or delays.
The ATS layer is where most of the operationally visible features live: the headway regulator that adjusts dwell times to maintain target throughput, the conflict detector that flags potential route conflicts before they become safety interventions, the predictive maintenance dashboard that flags rolling stock anomalies, and the customer information feed that publishes train positions to the agency’s mobile apps and platform displays. (For dispatcher-side detail, see Chapter 7 of the manuscript.)
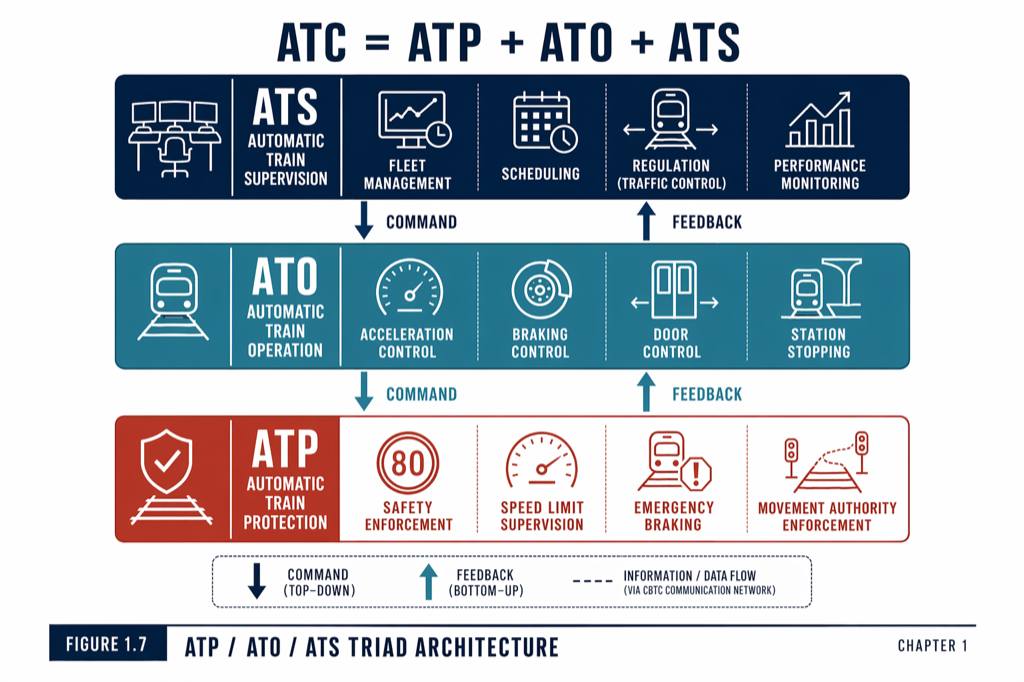 ATP enforces safety, ATO optimizes performance within the ATP envelope, ATS supervises the line. The safety arrow always points down.
ATP enforces safety, ATO optimizes performance within the ATP envelope, ATS supervises the line. The safety arrow always points down.
Where the safety boundary actually lives
The most useful way to internalize the triad is to ask three questions about any function the system performs:
What happens if the function fails silently? If the answer is “the train could exceed safe speed or violate separation,” the function is ATP and must be SIL 4. If the answer is “the train operates less efficiently or stops short of the platform,” the function is ATO and can be SIL 0 to SIL 2. If the answer is “the line operates with worse schedule adherence,” the function is ATS and can be SIL 0.
Who has final say in a conflict? ATP wins every conflict. ATO yields to ATP. ATS yields to both. This is not negotiable; it is the architectural backbone that makes the safety case provable.
What is the certification cost? ATP-grade development is expensive (V-model lifecycle, formal verification, diverse implementation, independent safety assessor). ATO is moderate. ATS is conventional software engineering. Pushing functions into ATP that do not need to be there inflates project cost without improving safety; pulling functions out of ATP that should be there compromises the safety case.
A concrete example: the platform stop
Consider what happens when a CBTC train approaches a station. ATS, working from the timetable, has commanded that this train stop at this platform. ATS provides a target dwell time and target departure time. ATO computes a deceleration profile that targets a stop within 30 centimeters of the platform marker, accounting for current speed, gradient, and brake performance. ATP, throughout the approach, computes a continuous speed envelope from current position to the platform stop point and supervises ATO’s actual speed against it.
If ATO’s deceleration profile is too aggressive — perhaps a brake fault is causing the train to undershoot — ATP detects the impending overspeed near the platform, commands the emergency brake, and forces a stop. The train stops short of the marker, the dispatcher sees an alarm, the operator acknowledges the event, and service resumes. ATP does not consult ATS or ATO before intervening.
This is the architecture working as designed. A poor procurement, by contrast, might specify “ATO with safety supervision” without specifying which functions are SIL 4 and which are SIL 0, leaving the vendor to draw the boundary. The vendor will draw the boundary that maximizes their commercial margin, not the boundary that maximizes the agency’s clarity in an incident.
Practical takeaways
- ATP is mandatory and SIL 4 in every CBTC deployment, regardless of GoA level. ATP cannot be overridden by ATO, ATS, the operator, or the dispatcher.
- ATO is the layer that delivers the operational benefits — precision stops, energy savings, capacity gains — but is not safety-critical because ATP catches every violation.
- ATS lives in the OCC, runs the timetable, and presents the line-wide picture to dispatchers. ATS is non-safety-critical but operationally essential.
- The safety hierarchy is fixed: ATP > ATO > ATS. Any procurement that blurs this boundary is a procurement that has not made the decisions that matter.
- Push functions into the right layer. ATP-grade certification is expensive; SIL-0 development is cheap. Drawing the boundary in the wrong place inflates cost or compromises the safety case.
Where to go next
This post is a 10-minute summary. The full treatment lives in [Chapter 3 — CBTC System Architecture Overview] and [Chapter 7 — Automatic Train Supervision] of Communications-Based Train Control (Volume 1 on Amazon). Download Chapter 3 slides (free PDF →)
Sources
- Wang, C. (2026). Communications-Based Train Control, Volume 1: Foundations & Technical Architecture. Independent. ISBN 979-8-258-54295-3. — Chapter 3, “CBTC System Architecture Overview.”
- IEEE Standards Association. IEEE Std 1474.1: Standard for Communications-Based Train Control (CBTC) Performance and Functional Requirements.
- International Electrotechnical Commission. IEC 62290-1: Railway applications — Urban guided transport management and command/control systems — Part 1: System principles and fundamental concepts.
- International Electrotechnical Commission. IEC 61508: Functional Safety of Electrical/Electronic/Programmable Electronic Safety-related Systems.
- CENELEC. EN 50126/50128/50129: Railway Applications — RAMS / Software / Safety-related Systems.
- WMATA. Red Line CBTC Modernization Status Reports. wmata.com
- BART. System History and Operations. bart.gov
Read the full treatment in the book
Chapter 3 of Communications-Based Train Control, Volume 1, covers this in depth.