trends · Article
Next-Gen Train Control: What Comes After CBTC?
A good way to start a 2026 conversation about what comes after CBTC is to acknowledge that CBTC is not going anywhere. The dominant US transit deployments — the L Line, the 7 Line, Queens Boulevard, BART’s TCMP, SFMTA Muni’s modernization, the Honolulu Skyline — sit on Wi-Fi-based CBTC architectures with 20- to 30-year asset lives, and the procurement pipeline through 2030 is dominated by additional Wi-Fi-based CBTC retrofits rather than by a successor technology. The interesting question is not whether CBTC will be replaced wholesale; it will not. The interesting question is which incremental capabilities will be added to the CBTC stack over the next ten to twenty years, where the research is credible enough to plan around, and where the marketing has run ahead of the engineering. This post walks the credible candidates one by one, with hedged timelines and honest distinctions between what is in research, what is in pilot, and what is realistic for US revenue service.
Setting the frame: what would actually replace CBTC
Three things would have to happen for a successor to fully displace CBTC. First, a credible new architecture would have to deliver capacity, safety, or cost gains large enough to justify rebuilding installed systems mid-life. Second, the standards bodies (IEEE, IEC, CENELEC, the FRA and FTA) would have to standardize the new architecture to a level that supports certification. Third, the vendor ecosystem (Siemens, Alstom, Hitachi Rail STS, and the second-tier specialists) would have to produce mature commercial products. As of 2026, no candidate technology meets all three criteria. The honest framing is that the next decade is about adding capabilities to CBTC, not replacing it. (For where CBTC sits today, see What Is Communications-Based Train Control (CBTC)? A 2026 Plain-English Guide.)
Virtual coupling and Virtually Coupled Train Sets
The most operationally transformative candidate is virtual coupling. The basic idea is that multiple trains in a convoy operate as a coordinated set, communicating directly train-to-train via dedicated radio. Safe separation is maintained through continuous exchange of position, velocity, acceleration, and braking intent. The leading train’s braking curve becomes the constraint for the entire consist, and the gap between train ends can shrink to well below the absolute braking distance required by traditional CBTC. Preliminary research suggests virtual coupling could nearly double practical capacity compared to conventional moving-block signaling.
The European rail research community has invested heavily in Virtually Coupled Train Sets (VCTS) under Shift2Rail and the successor Europe’s Rail program. Major rolling-stock manufacturers — Hitachi, Siemens, Alstom — have conducted trials of train-to-train communication compatible with ERTMS Level 4 specifications. Technology Readiness Levels for VCTS in Europe sit at TRL 5 to 6 in 2026 (prototype demonstrated in a relevant environment), which is past pure research but not yet at production maturity.
The new failure modes are substantial. Train-to-train communication failure must be handled deterministically, and a following train that loses contact with the leader must assume worst-case braking. The safety case has to address adversarial RF conditions, latency outliers, and the timing of fault propagation through a multi-train consist. The certification pathway is not yet established at the standards level.
For US transit, virtual coupling is likely a 2035-or-later capability. Commercial deployment in revenue service is unlikely before 2035 in Europe; US adoption typically lags European deployment by three to seven years for transit-grade safety-critical capabilities. The US use case that fits best is not metro (which is dwell-time-constrained, not signal-constrained) but congested commuter rail trunk lines on the Northeast Corridor, in California, and in the Chicago region. Agencies interested in VCTS should participate in standards-development working groups and consider supporting one targeted pilot project on a lower-density corridor by the late 2020s.
GNSS-based moving block
Present-day CBTC positioning relies on fusion of wayside balises, onboard tachometer odometry, and Doppler radar. This works robustly in tunnels but is economically and operationally cumbersome for at-grade or elevated corridors over long distances. Global Navigation Satellite System positioning — anchored on multi-constellation satellite coverage (US GPS, European Galileo, Russian GLONASS, Chinese BeiDou) and augmented with Satellite-Based Augmentation Systems and ground-based Real-Time Kinematic correction — offers a path toward reducing wayside infrastructure dependency.
The European reference architecture is ERTMS / ETCS Level 3, which is intended to operate without trackside train detection — train integrity is reported by the train itself and position is determined by GNSS plus onboard sensors. ETCS Level 3 has been demonstrated in research and in pilot programs but has not been deployed widely in revenue service. The capacity gains are real on lightly-trafficked corridors; the difficulty is the safety case for a system that depends entirely on trains’ self-reporting of position and integrity. (For the European-versus-US comparison, see CBTC vs ETCS: A Side-by-Side for US Engineers.)
In the US, Positive Train Control already employs GPS as the primary positioning source. Extending this to safety-critical moving-block train control requires multi-constellation GNSS receivers, integrity monitoring to detect spoofing or jamming, ground-side RTK correction infrastructure, and a SIL 4 certification pathway that current standards do not yet provide. For transit, GNSS-based moving block on light-rail or commuter-rail lines that lack the density to justify a full balise network is a plausible incremental capability for 2028 to 2032 pilot deployments. Tunnel sections will continue to use balises; hybrid GNSS-plus-balise architectures are the realistic deployment pattern.
GNSS spoofing and jamming are not theoretical threats. Deployed mitigations include anti-jam antennas, cryptographic authentication of GNSS signals (via the Galileo Open Service Navigation Message Authentication and similar capabilities), and continuous integrity monitoring with redundant cross-checks. Agencies considering GNSS-based positioning should engage with the FRA, coordinate with the TSA on cybersecurity, and plan for phased rollout on lower-risk, fully grade-separated corridors.
CBTC-ETCS hybrid architectures
A third credible direction is convergence between CBTC and the European Train Control System. Both technologies share a moving-block conceptual core (in ETCS Level 3) and both target safety-critical train control with continuous communication. The differences are real — ETCS uses Eurobalises and a different safety-case structure, CBTC uses 802.11 or LTE-R radio and IEEE 1474 performance requirements — but the gap is bridgeable in principle.
Vendor product portfolios are converging. Siemens, Alstom, and Hitachi Rail STS each maintain both CBTC and ETCS product lines, and over the past five years each has begun modularizing the safety-critical core to enable cross-product reuse. The implication for US transit is not that ETCS will be deployed in US metros; it is that the underlying onboard and wayside computing platforms will become more interchangeable, the radio layer will become more standardized through FRMCS-derived components, and the cybersecurity and software-engineering practices will become more uniform.
For commuter rail in the US, the CBTC-ETCS-PTC hybrid question is more interesting. A US commuter rail trunk line that operates on FRA jurisdiction (and therefore needs PTC for compliance) but wants moving-block capacity (which PTC does not provide) has three architectural options: a moving-block overlay on existing PTC (the architectural pattern Caltrain CBOSS attempted), a parallel CBTC-on-dedicated-corridor deployment with PTC compatibility on shared trackage, or an ETCS-derived hybrid that satisfies both regulatory frameworks through a single product family. None of these is mature in 2026; the first attempts on US corridors are projected for 2030 to 2040 by current vendor roadmaps.
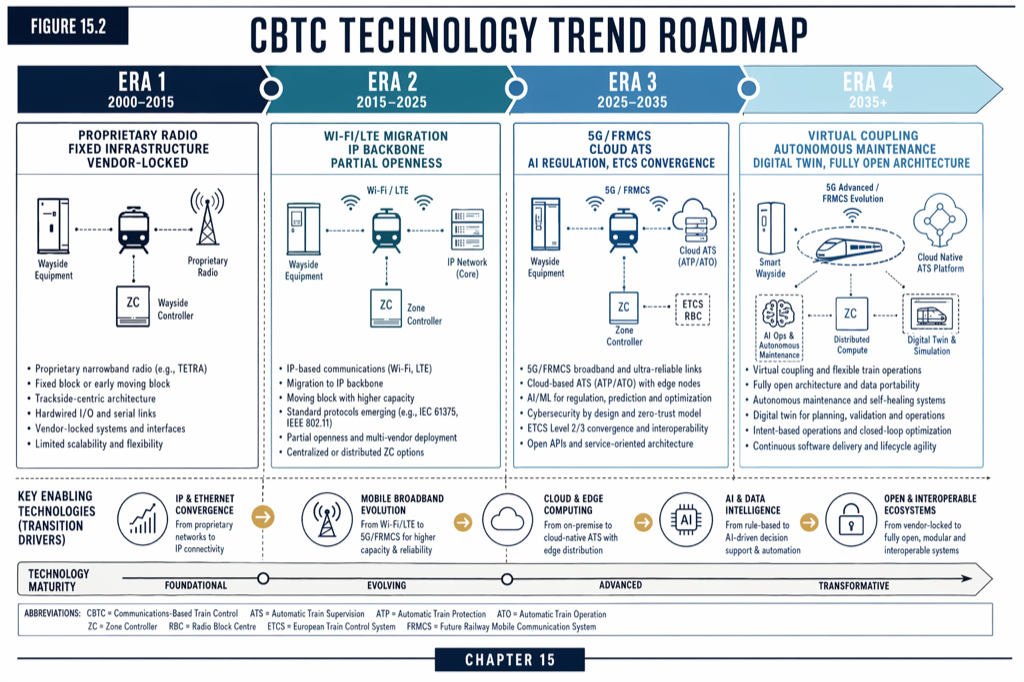 Five credible directions for next-generation train control beyond current CBTC, plotted by Technology Readiness Level and projected production timeline.
Five credible directions for next-generation train control beyond current CBTC, plotted by Technology Readiness Level and projected production timeline.
Software-defined and cloud-native architectures
Current CBTC systems are predominantly monolithic: signaling logic, train control algorithms, and timetable management run on hardened, proprietary hardware at wayside locations. A software-defined approach separates safety-critical functions (ATP, ATO) on edge devices from non-safety functions (ATS, analytics, fleet management, maintenance diagnostics) running in cloud-native environments. The benefit is agility, faster software updates on the non-safety layer, easier integration with modern IT infrastructure, and lower total cost of ownership.
The European research community is exploring Network Functions Virtualization (NFV) under the ERTMS Evolution Programme, including running traditionally hardware-bound functions on virtualized servers. The associated risk is cybersecurity: expanding the attack surface from physically isolated legacy systems to cloud-connected, software-updated infrastructure opens new vulnerabilities. Agencies planning software-defined CBTC deployments must view cybersecurity as foundational rather than as a bolt-on. The TSA Security Directives 1580 and 1582 and the NIST SP 800-82 Revision 3 baseline apply from procurement.
US transit agencies are moving more cautiously than European counterparts on software-defined architectures. The Automatic Train Supervision layer is the natural starting point — non-safety-critical, modernization-friendly, and where most of the current cloud-native development is happening. A reasonable pattern for 2026 to 2032 is software-defined ATS on cloud infrastructure with safety-critical ATP and Zone Controller functions remaining on edge hardware with deterministic real-time behavior.
Post-quantum cryptography
Current CBTC systems rely on elliptic-curve cryptography (ECDSA) and symmetric encryption (AES) for train communication. These algorithms are secure against classical computers but vulnerable in principle to large-scale quantum computer attacks, which the consensus quantum-computing literature projects for the 2030s or 2040s. The US National Institute of Standards and Technology has published post-quantum cryptography standards (FIPS 203, 204, 205, finalized in 2024), specifying ML-KEM for key encapsulation, ML-DSA for digital signatures, and SLH-DSA for hash-based signatures.
For rail CBTC, the implication is that firmware and software roadmaps need to incorporate post-quantum cryptographic libraries well before quantum computers pose an imminent threat. Agencies writing new CBTC procurements in 2026 and beyond should include post-quantum cryptographic readiness as an evaluation criterion. The cost of inclusion is low; the cost of retroactive migration on a fielded fleet is high.
This is one of the few “next-generation” capabilities that has a clear standards baseline (the NIST FIPS publications), a defined transition pathway (NIST is actively guiding migration), and a low-friction integration pattern (post-quantum algorithms are designed for drop-in replacement of classical algorithms in most protocol roles). Of the candidates discussed in this post, post-quantum cryptography is the easiest to act on in a 2026 procurement.
Advanced sensor fusion and computer vision
The rail industry is exploring sensors proven in automotive autonomous driving — inertial measurement units for continuous dead-reckoning during satellite signal loss, light detection and ranging (LiDAR) for real-time obstacle detection and platform-edge safety monitoring, and computer vision for track-occupancy validation, intrusion detection, and signal-aspect verification. These sensors introduce redundancy and improve situational awareness, particularly for GoA 4 systems operating at-grade with partial grade separation.
A few leading systems (the Las Vegas Monorail, several recent European light-rail networks, selected automated people movers) have integrated LiDAR for real-time scanning of the right-of-way. Computer vision remains less mature for safety-critical applications; the challenge is not the underlying technology but the SIL 4 certification pathway, which standards bodies have not yet established for vision-based safety decisions. IMUs are already used in some at-grade CBTC deployments as Doppler-radar redundancy.
For US transit, advanced sensor fusion is most relevant for at-grade GoA 4 deployments where obstacle detection on the right-of-way is operationally essential. The Honolulu Skyline, fully grade-separated, has not needed it; the next generation of US driverless deployments — possibly future SFMTA, MARTA, or BART expansions — may. The realistic timeline is 2028 to 2032 pilots and 2032 to 2038 production deployments on at-grade automated systems.
What this means in practice
- CBTC will not be wholesale replaced by a successor in the next ten years. The interesting question is which capabilities are added incrementally to the CBTC stack, where the research is credible, and where vendor and standards maturity actually arrives.
- Virtual coupling (VCTS) is at TRL 5 to 6 in Europe and could add capacity on commuter rail trunk lines. Commercial revenue service is unlikely before 2035; US adoption typically lags European deployment.
- GNSS-based moving block is plausible for at-grade light-rail and commuter-rail corridors as an alternative to dense balise networks. Hybrid GNSS-plus-balise architectures are realistic; tunnel sections will continue to use balises. Pilot deployments are appropriate for 2028 to 2032.
- CBTC-ETCS hybrid architectures and CBTC-PTC convergence on US commuter rail trunk lines are plausible only after vendor product modularization matures and FRMCS-derived radio standardization propagates. Realistic timeline is 2030 to 2040 for first production deployments.
- Software-defined and cloud-native architectures are appropriate for the ATS and analytics layers near-term and for safety-critical functions only after substantial cybersecurity and standards work.
- Post-quantum cryptography is the easiest next-generation capability to act on in 2026. NIST FIPS 203/204/205 provide the standards baseline; agencies should specify post-quantum readiness in new procurements now.
Where to go next
This post is a 10-minute briefing. The full discussion of the technology roadmap, including TRL assessments and vendor timelines, lives in Chapter 15 of Communications-Based Train Control (Volume 2): Buy on Amazon.
Sources
- Wang, C. (2026). Communications-Based Train Control, Volume 2: Operations, Lifecycle & US Deployment. Independent. ISBN 979-8-258-54295-3. — Chapter 15, “Vendor Landscape and Technology Trends.”
- European Commission. Europe’s Rail Joint Undertaking (formerly Shift2Rail) — VCTS and ERTMS Evolution research. rail-research.europa.eu
- International Union of Railways (UIC). Future Railway Mobile Communication System (FRMCS) program documentation. uic.org
- European Union Agency for Railways. ERTMS / ETCS specifications and Level 3 development. era.europa.eu
- IEEE Standards Association. IEEE Std 1474.1 and 1474 series — CBTC Performance and Functional Requirements.
- National Institute of Standards and Technology. FIPS 203 (ML-KEM), FIPS 204 (ML-DSA), FIPS 205 (SLH-DSA) — Post-Quantum Cryptography Standards. nist.gov/pqc
- Federal Railroad Administration. Positive Train Control and Next-Generation Positioning Systems Research. railroads.dot.gov
- Federal Transit Administration. Research and Demonstration Program. transit.dot.gov
- Transportation Security Administration. Security Directives 1580 and 1582.
Read the full treatment in the book
Chapter 11 of Communications-Based Train Control, Volume 2, covers this in depth.