definitional · Article
What Is Communications-Based Train Control (CBTC)? A 2026 Plain-English Guide
In April 2009, after a decade of contract disputes, integration delays, and long weekend cutovers, the New York City Metropolitan Transportation Authority (MTA) declared its 14th Street–Canarsie Line — the L Line — fully operational under a new signaling system from Siemens Transportation Systems. The fixed-block relay logic that had governed L trains since the Truman administration was retired. In its place: a moving-block control system whose authority was carried not by colored signal heads but by digital messages exchanged hundreds of times a minute between trains and trackside computers. That system was Communications-Based Train Control. Seventeen years later, every US transit agency with serious modernization plans is studying the same architecture.
Why this article exists
If you are a transit agency program manager, a state Department of Transportation reviewer, an FTA grants officer, or a software engineer wondering why so many billions of dollars in Capital Investment Grant (CIG) money flow into a niche corner of railway signaling, this article is the orientation you need. It defines Communications-Based Train Control (CBTC) precisely, explains the three architectural pillars that distinguish it from everything that came before, and grounds the discussion in real US deployments rather than vendor brochures. It does not assume prior signaling experience. It does assume you want a working mental model rather than a tour of acronyms. The depth lives in the manuscript; this post is the on-ramp. By the end, you will be able to read a CBTC RFP, follow a vendor presentation, and ask the questions that separate a serious procurement conversation from a sales pitch.
The IEEE 1474.1 definition, decoded
The authoritative US definition of CBTC is set by IEEE Std 1474.1. It describes CBTC as a continuous automatic train control system that uses high-resolution train location determination independent of track circuits, continuous high-capacity bidirectional train-to-wayside data communications, and onboard and wayside processors capable of implementing vital functions. Each clause encodes a design choice with operational consequences.
“Continuous” rules out systems that update train state only when a train passes a discrete trackside marker. CBTC supervises the train every cycle, typically every 200 to 500 milliseconds. “Independent of track circuits” rules out the inferential position model of fixed-block signaling, where the system knows only that a train is somewhere within a 300-meter block. “Bidirectional” rules out one-way cab signaling: the train reports position and status to the wayside, and the wayside replies with a fresh authorization. “Vital onboard processors” rules out architectures where all safety logic sits trackside and the train merely obeys; in CBTC, the train’s own computer is part of the safety case and must be certified to Safety Integrity Level 4 under IEC 61508.
This definition matters because it sets a procurement floor. When a transit agency writes “we want CBTC,” IEEE 1474.1 supplies the minimum technical content of that promise. Vendors who deliver less are out of compliance. Agencies who specify less get something that may look like CBTC but cannot deliver its operational benefits.
 Each clause of the IEEE 1474.1 CBTC definition maps to a specific architectural commitment.
Each clause of the IEEE 1474.1 CBTC definition maps to a specific architectural commitment.
The three pillars
CBTC is, at its core, three commitments executed together.
The first is high-resolution train location. A CBTC train knows where it is to within roughly one to two meters at all times. It achieves this through sensor fusion: tachometers on the wheelsets give relative odometry, a Doppler radar corrects for wheel slip and slide, and trackside balises (passive transponders) reset accumulated drift each time the train passes one. The wayside no longer infers train position from track-circuit occupancy; the train tells the wayside, continuously, where it is.
The second pillar is continuous bidirectional digital communication. Most US deployments use 2.4 GHz or 5 GHz spread-spectrum radio with overlapping wayside access points; some newer systems run over LTE or private 5G. The link carries three message types: position reports flowing from train to wayside, Movement Authorities flowing back the other direction, and aggregated status flowing to the central Automatic Train Supervision (ATS) system. Every link is redundant, every message authenticated, and every gap in the link triggers a defined fallback behavior in under five seconds.
The third pillar is distributed vital processing. Onboard, a Vehicle On-Board Controller (VOBC) supervises every aspect of train motion against the latest authority it has received. On the wayside, a Zone Controller (ZC) owns a 2-to-5-kilometer territory, tracks every train inside it, generates Movement Authorities, and hands off cleanly to the next zone at boundaries. Each side runs in 2-out-of-2 or 2-out-of-3 redundant configuration so that no single processor fault produces an unsafe outcome.
These three pillars enable the moving-block paradigm: instead of dividing the track into fixed sections that one train at a time may occupy, CBTC computes a virtual buffer around each train, sized to the train’s current speed, braking performance, and the position of the train ahead. The result, on the L Line, was a sustainable peak headway near 110 seconds where the legacy fixed-block system had bottomed out around 150 seconds. (For the side-by-side mechanics, see CBTC vs Traditional Signaling: 8 Concrete Differences.)
ATP, ATO, ATS: what does what
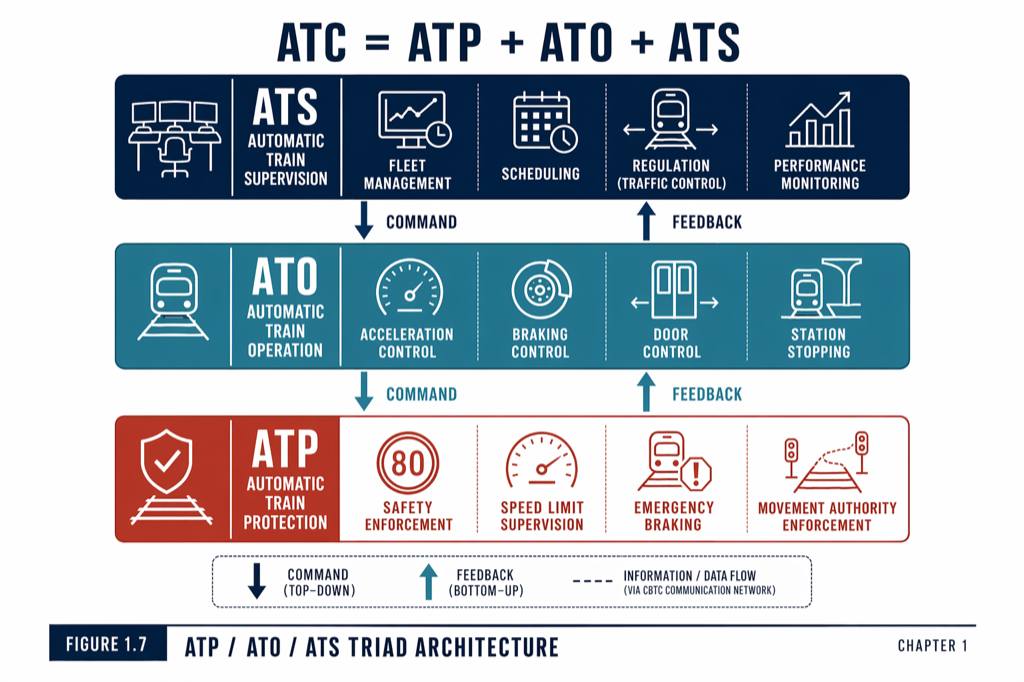
Inside any CBTC system, three functional layers do three different jobs. Confusing them is the most common source of procurement misunderstanding.
Automatic Train Protection (ATP) is the safety-critical floor. It enforces the Movement Authority. If the train approaches the end-of-authority point too fast, ATP applies the emergency brake without asking the driver, the dispatcher, or the ATO system for permission. ATP is mandatory at every Grade of Automation from GoA 1 (manual driving with safety supervision) to GoA 4 (unattended train operation). ATP is the layer that must be SIL 4 certified.
Automatic Train Operation (ATO) is the performance layer. It commands traction and braking to follow a target speed profile, stops the train within roughly 30 centimeters of the platform marker, and selects energy-efficient coast points. ATO is not safety-critical; it is a passenger-comfort and capacity optimizer that operates strictly inside the envelope ATP has drawn.
Automatic Train Supervision (ATS) is the line-level brain in the operations control center. It dispatches trains, regulates schedules, sets routes through interlockings, and presents the human operator with the line-wide picture. ATS is advisory: if it tells a train to leave the platform but ATP says brake, ATP wins.
A useful summary: ATP says “you cannot go faster than X.” ATO says “the right speed for this segment is Y, and Y is at most X.” ATS says “according to the timetable, you should leave the platform at 8:42:30.” The hierarchy is non-negotiable. (A deeper treatment lives in ATP, ATO, ATS: The Three-Layer Triad of Modern Train Control.)
 ATP enforces safety; ATO optimizes performance within ATP’s envelope; ATS supervises the line.
ATP enforces safety; ATO optimizes performance within ATP’s envelope; ATS supervises the line.
Why agencies adopt CBTC
Three pressures drive every CBTC business case. The first is capacity. Fixed-block signaling on a busy metro corridor saturates near 24 to 28 trains per hour per direction. The L Line, post-CBTC, sustains 24 to 29 trains per hour in revenue operation. That difference is a permanent uplift in carrying capacity without buying a single additional train kilometer of right-of-way.
The second is reliability. Aging relay-based interlockings on US legacy systems produce a steady stream of signal-related delays. The MTA reports that signal failures account for a meaningful share of A Division service disruptions, and replacement components for 1960s-era track-circuit modules are no longer manufactured. CBTC replaces hundreds of distributed signal heads, track circuits, and relay houses with a much smaller set of zone controllers and access points, dramatically reducing the surface area of legacy hardware.
The third is the long path toward higher Grades of Automation. A driverless service like the JFK AirTrain, opened in December 2003, or the Honolulu Skyline, which began revenue service in 2023, is impossible without CBTC’s continuous supervision. Even agencies that intend to keep operators on board, such as the MTA and Bay Area Rapid Transit (BART), benefit from the energy savings (commonly 8 to 12 percent) and from the precision of automated station stops.
What CBTC is not
CBTC is not Positive Train Control. PTC is the US mainline regulator’s safety overlay for freight and intercity rail mandated by the Rail Safety Improvement Act of 2008 and operating under Federal Railroad Administration jurisdiction. CBTC is a metro and rapid-transit technology operating under Federal Transit Administration oversight and state safety oversight (SSO) review. The two share some vocabulary; they do not share architectures, regulators, or supplier ecosystems.
CBTC is not the European Train Control System (ETCS). ETCS Level 2 is a wireless cab-signaling system that retains fixed-block separation for high-speed mainline operation. ETCS Level 3, which approximates moving block, exists in pilot form but is not deployed at scale. CBTC is the urban metro answer; ETCS is the mainline answer.
CBTC is not driverless by definition. The vast majority of deployed CBTC lines worldwide still carry a human operator. Driverless operation is a separate choice expressed through the Grades of Automation framework, and it requires a much larger set of decisions about platform screen doors, evacuation protocols, labor agreements, and public acceptance.
Practical takeaways
- The IEEE 1474.1 definition is the procurement floor. Specify it explicitly in any RFP that uses the term CBTC.
- The three pillars (high-resolution localization, continuous bidirectional communication, distributed vital processing) are inseparable; a vendor offering two of them is not offering CBTC.
- The ATP/ATO/ATS hierarchy is fixed. ATP cannot be overridden, ATO must respect ATP, ATS is advisory to both.
- Capacity is the most quantifiable benefit; reliability and the path to higher Grades of Automation are the strategic ones.
- CBTC is distinct from PTC and ETCS. The acronyms are easy to mix up; the regulators, vendors, and architectures are not.
Where to go next
This post is a brief overview. The full treatment lives in [Chapter 1 — The Evolution of Train Control] and [Chapter 3 — CBTC System Architecture Overview] of Communications-Based Train Control (Volume 1 on Amazon). Download Chapter 1 slides (free PDF →)
Sources
- Wang, C. (2026). Communications-Based Train Control, Volume 1: Foundations & Technical Architecture. Independent. ISBN 979-8-258-54295-3. — Chapter 1, “The Evolution of Train Control”; Chapter 3, “CBTC System Architecture Overview.”
- IEEE Standards Association. IEEE Std 1474.1: Standard for Communications-Based Train Control (CBTC) Performance and Functional Requirements.
- International Electrotechnical Commission. IEC 62290-1: Railway applications — Urban guided transport management and command/control systems — Part 1: System principles and fundamental concepts.
- International Electrotechnical Commission. IEC 61508: Functional Safety of Electrical/Electronic/Programmable Electronic Safety-related Systems.
- MTA New York City Transit. Communications-Based Train Control Status Update. new.mta.info/project/communications-based-train-control-cbtc
- Federal Transit Administration. State Safety Oversight Program. transit.dot.gov/regulations-and-guidance/safety/state-safety-oversight
- Honolulu Authority for Rapid Transportation. Skyline Project Overview. honolulutransit.org
Read the full treatment in the book
Chapter 1 of Communications-Based Train Control, Volume 1, covers this in depth.